Interrupt
The Interrupt class represents a single interrupt pin in the block
design. It mimics a python Event by having a single wait function that
blocks until the interrupt is raised. The event will be cleared automatically
when the interrupt is cleared. To construct an event, pass in fully qualified
path to the pin in the block diagram, e.g. 'my_ip/interrupt' as the only
argument.
An interrupt is only enabled for as long there is a thread or coroutine waiting on the corresponding event. The recommended approach to using interrupts is to wait in a loop, checking and clearing the interrupt registers in the IP before resuming the wait. As an example, the AxiGPIO class uses this approach to wait for a desired value to be present.
class AxiGPIO(DefaultIP): # Rest of class definition def wait_for_level(self, value): while self.read() != value: self._interrupt.wait() # Clear interrupt self._mmio.write(IP_ISR, 0x1)
Interrupt Controller
To integrate into the PYNQ framework Dedicated interrupts must be attached to an AXI Interrupt Controller which is in turn attached to the first interrupt line to the processing system.
The AXI Interrupt Controller can be avoided for overlays with only one interrupt, in such overlays the interrupt pin must be connected to the first interrupt line of the processing system.
PYNQ only support interrupts that are ultimately connected to IRQ_F2P[0].
An Example for the PYNQ Interrupt Subsystem
The PYNQ Interrupt class is an asyncio-compatible interface to handling
interrupts from the fabric. This example aims to:
Show how to create a block design compatible with PYNQ
Introduce the
asynciointerface and how to call it from other contextsProvide an example of the of the recommended way to write a driver for existing IP
Hardware Design
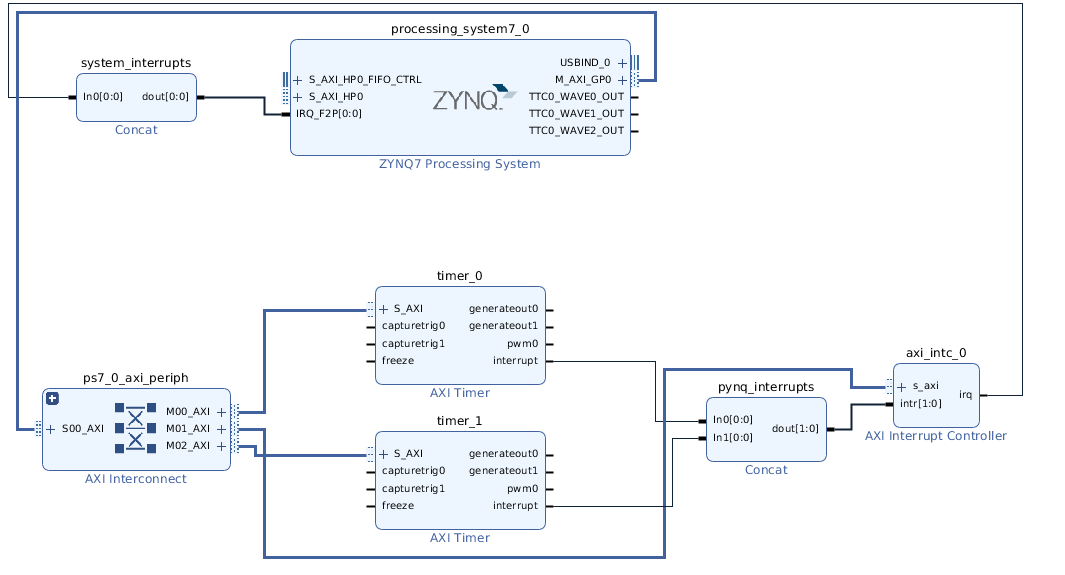
In this example we are using two independent instances of the AXI Timer IP from the Xilinx IP library.
The PYNQ interrupt software layer is dependent on the hardware design meeting the following restrictions
All interrupts must ultimately be connected to the first interrupt line of the ZYNQ block
Multiple interrupts must be combined using AXI Interrupt controllers
This block design below shows the pattern of using a concat IP block to combine all of the single interrupts into a single interrupt bus that then passed into the input of both the interrupt controller and the processing system.
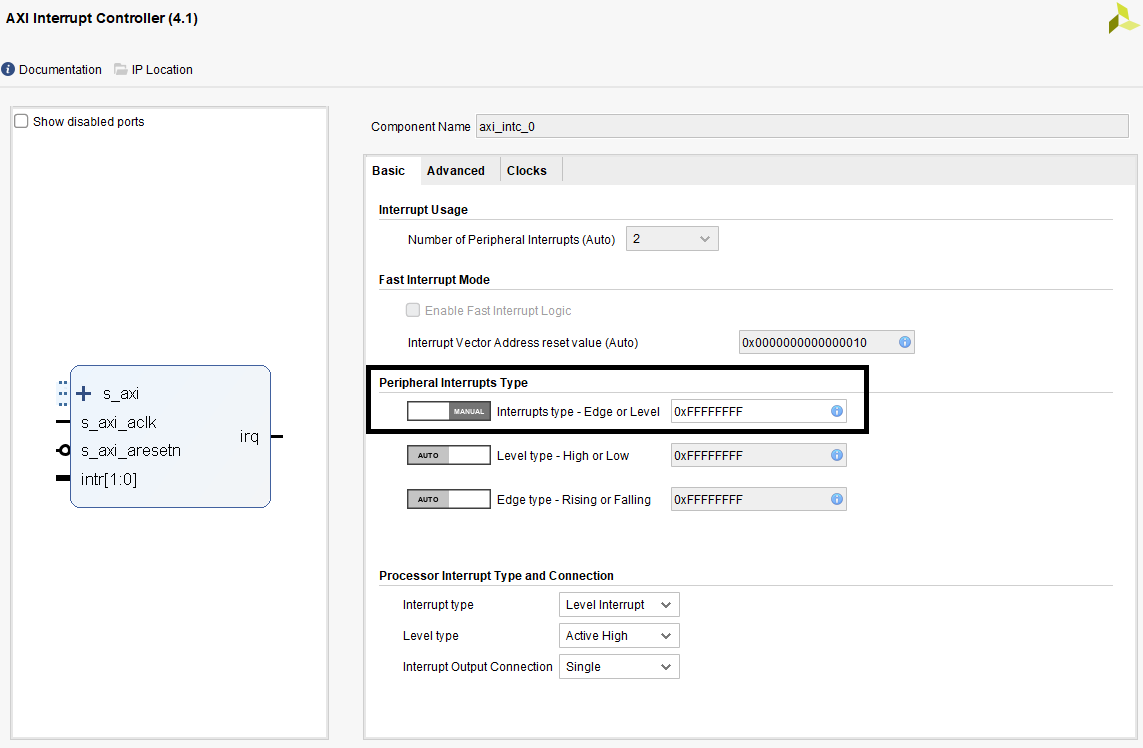
The default Peripheral Interrupt Type, set by the block automation, is Level. This causes that not all interrupts can be caught in Pynq. Change the Peripheral Interrupt Type in the AXI Interrupt Controller block from Level to Edge, by setting the Interrupt Type - Edge or Level to Manual. Then enter value 0xFFFFFFFF.
Exploring Interrupts in Software
With the hardware design complete we can start exploring the software architecture. To do this first we load the new overlay
import pynq ol = pynq.Overlay('timer_interrupts.bit')
We can get access to instances of the interrupt class by navigating the
overlay object. Each IP instances has a _interrupts dictionary which lists
the names of the interrupts
timer1 = ol.timer_1 timer1._interrupts{'interrupt': {'controller': 'axi_intc_0', 'fullpath': 'timer_1/interrupt', 'index': 1}}
And the interrupts object can then be accessed by its name
interrupt = timer1.interrupt
The Interrupt class provides a single function wait which is an asyncio
coroutine that returns when the interrupt is signalled. To demonstrate this
we first need to look at the documentation for the timer and see how to get
it to fire after a specific period of time. We can also look at the register
map of the IP in Python to assist
timer1.register_mapRegisterMap { TCSR0 = Register(MDT0=0, UDT0=1, GENT0=0, CAPT0=0, ARHT0=0, LOAD0=0, ENIT0=1, ENT0=1, T0INT=0, PWMA0=0, ENALL=0, CASC=0), TLR0 = Register(TCLR0=500000000), TCR0 = Register(TCR0=4294967295), TCSR1 = Register(MDT1=0, UDT1=0, GENT1=0, CAPT1=0, ARHT1=0, LOAD1=0, ENIT1=0, ENT1=0, T1INT=0, PWMA1=0, ENALL=0), TLR1 = Register(TCLR1=0), TCR1 = Register(TCR1=0) }
The programming steps for the timer are to do the following:
Load the value to count from in the TLR0 register
Set then clear the LOAD0 bit to trigger the load
Set the ENIT0 bit to enable the interrupt output
Set the UDT0 bit to get the timer to count down
Set the ENT0 bit start the timer
Once the interrupt is signalled we then need to write to the T0INT bit
to clear the interrupt.
We can package all of this into a coroutine as follows
async def wait_for_timer1(cycles): timer1.register_map.TLR0 = cycles timer1.register_map.TCSR0.LOAD0 = 1 timer1.register_map.TCSR0.LOAD0 = 0 timer1.register_map.TCSR0.ENIT0 = 1 timer1.register_map.TCSR0.ENT0 = 1 timer1.register_map.TCSR0.UDT0 = 1 await timer1.interrupt.wait() timer1.register_map.TCSR0.T0INT = 1
To test this we need to use the asyncio
library to schedule our new coroutine. asyncio uses event loops to
execute coroutines. When python starts it will create a default event loop
which is what the PYNQ interrupt subsystem uses to handle interrupts.
import asyncio loop = asyncio.get_event_loop()task = loop.create_task(wait_for_timer1(500000000)) loop.run_until_complete(task)
The low-level details
To see what interrupts are in the system we can look at the interrupt_pins
dictionary. Each entry is a mapping from the name of a pin in the block
diagram to the interrupt controller that manages it.
ol.interrupt_pins{'pynq_interrupts/In0': {'controller': 'axi_intc_0', 'fullpath': 'pynq_interrupts/In0', 'index': 0}, 'pynq_interrupts/In1': {'controller': 'axi_intc_0', 'fullpath': 'pynq_interrupts/In1', 'index': 1}, 'timer_0/interrupt': {'controller': 'axi_intc_0', 'fullpath': 'timer_0/interrupt', 'index': 0}, 'timer_1/interrupt': {'controller': 'axi_intc_0', 'fullpath': 'timer_1/interrupt', 'index': 1}}
This is a low level description of what’s going on but can be useful to make sure that interrupts are being detected as intended. At a slightly higher level, each entry in the IP dictionary contains the subset of the complete dictionary applicable only to that IP.
ol.ip_dict['timer_0']['interrupts']{'interrupt': {'controller': 'axi_intc_0', 'fullpath': 'timer_0/interrupt', 'index': 0}}